
在智能清洁设备领域,泳池机器人普遍存在“多维度运动干扰、坐标系失效、误差累积效应”等行业公认的技术难题。与扫地机、割草机等二维平面作业设备不同,泳池机器人需频繁完成越障、垂直爬墙、水下作业等三维空间运动,当机器人处于垂直爬墙工作状态时,IMU相对于原水平地理坐标系的航向角还可能出现失效现象,严重影响机器人作业性能。
针对上述问题,眸星科技 MZ100六轴姿态模块专门设计具备针对泳池机器人的“智能爬墙模式”,可自主检测机器人上墙状态,并通过动力学约束等优化算法,有效解决机器人重复上下墙以及长时间墙上作业时的航向角漂移痛点问题。
“智能爬墙模式”下,MZ100会对机器人姿态进行实时检测,并将机器人运动平面区分为“非垂直平面”和“垂直平面”。
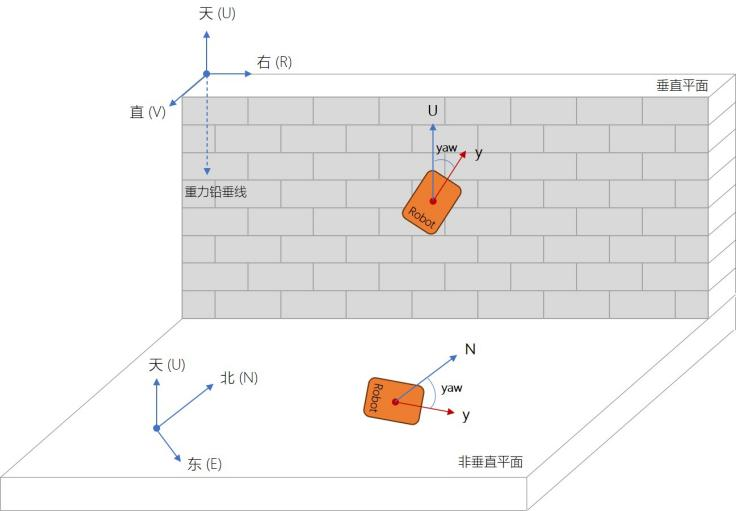
当机器人在池底、水面等“非垂直平面”进行作业时,地理坐标系使用“东-北-天(ENU)”坐标系。当 MZ100检测到机器人在池壁“垂直平面”进行爬墙作业时,地理坐标系将自动切换使用墙面坐标系“右-天-直(RUV)”。“非垂直平面”与“垂直平面”由 MZ100自适应判断和无缝切换。双坐标系的定义和使用,可方便用户采用与池底、水面等“非垂直平面”上相同的方式,在墙面对机器人进行运动规划与控制。
在此基础上,MZ100专门开发适配了智能爬墙姿态估计算法。通过动力学约束、机器学习状态机等处理,显著抑制了误差增长。
实测结果表明,MZ100短时重复上下墙的航向角误差,以及长时爬墙(墙上保持运动1h)的航向角误均在3°以内,可有效解决机器人重复上下墙以及长时间墙上作业时的航向角漂移痛点问题。




