
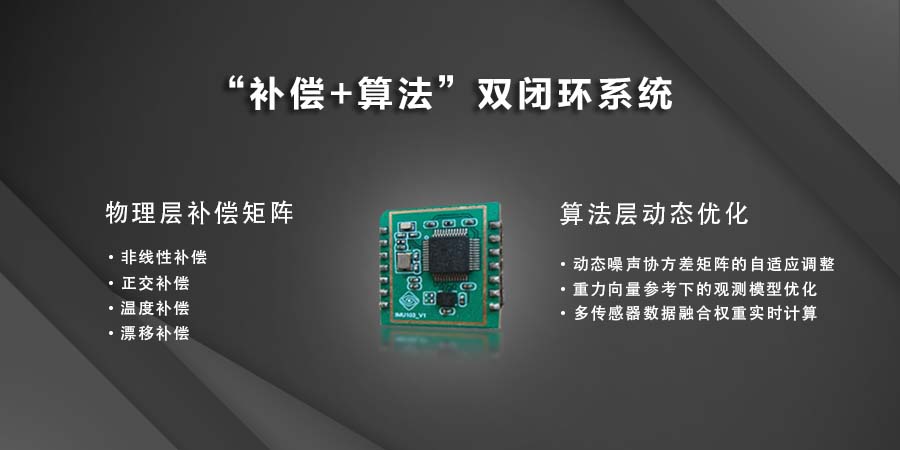
眸星科技(EYESTAR®)MZ100 六轴姿态模块内置3 轴低噪声 MEMS 加速度计和 3 轴 MEMS 陀螺仪, 采用非线性补偿、正交补偿、温度补偿和漂移补偿等标定手段,通过机械编排滤波算法输出提供具有重力向量参考的俯仰角(Pitch)、横滚角(Roll)以及无参考标准的航向角(Yaw)信息,宽测量量程,可适应各种复杂运动场景。 内置IIC 接口,可用于连接外部磁力传感器,结合硬件加速引擎,向应用端输出完整的融合演算数据。尤其适用于自动驾驶、割草机器人、泳池清洁机器人、AGV、机械控制等领域。
从“测量工具”到“决策伙伴“
以泳池机器人为例,在垂直壁面清洁场景中,机器人需完成底部至墙面的三维运动转换,其机械结构无法沿用传统扫地机器人的碰撞检测方案。主要依托加速度传感器实时监测俯仰角参数,当机器人接触池壁时,俯仰角变化量超过预设阈值即触发定位信号。然而高频次的角度突变易导致航向角积分误差累积,这对惯性导航系统提出多维精度要求,不仅需要保持高精度稳定输出,X/Y 双轴陀螺仪亦需达到同等精度等级以抑制航向漂移。
眸星科技 MZ100模块能做到自主预判趋势,模块内置“感官器官”,“高精度传感+边缘智能+宽域适应”的三位一体架构,双重校验提升可靠性。通过分析加速度变化率,采用高性能的微处理器和先进的动力学解算与卡尔曼动态滤波算法,能够快速求解出模块当前的实时运动姿态,提前预判感知。
让复杂技术“隐形化”
当设备走向高动态、强扰动的复杂工况,姿态测量已从辅助传感器升级为运动控制的核心决策单元。MZ100的四维补偿体系,即“补偿+算法”的双闭环系统;IMU内置机器学习内核,结合边缘处理能力,通过MLC实现传感器数据实时推理,响应延迟降低90%。在物理层做减法(误差消除),在算法层做乘法(数据增值),构建真正可信赖的空间感知能力。
通过对 MZ100 六轴姿态模块进行性能测试和分析,测试场景和用例涵盖静态、动态、连续开关机、夜间降温、午间升温等测试。测试结果表明,MZ100 一小时动态测试航向角累积误差不超过10°。与此同时,所有模块出厂前都逐一进行严格温补,能够良好满足智能割草机、泳池机器人、AGV、智慧农业、机械控制等领域应用需求。




